嵟揔儖乕僩扵嶕僄儞僕儞eREX
 嵟揔側幵椉偺専嶕傪eREX偱幚尰
嵟揔側幵椉偺専嶕傪eREX偱幚尰 - 嵟揔儖乕僩扵嶕僄儞僕儞 eREX 傪巊梡偡傞偲丄僞僋僔乕攝幵偵偍偄偰屭媞偵嵟揔側幵椉傪専嶕壜擻
桪傟偨専嶕惈擻 - eREX偼乽暋悢偺弌敪抧乿偐傜乽暋悢偺栚揑抧乿傊偺宱楬傪堦妵扵嶕壜擻
- 堦妵扵嶕婡擻傪嬱巊偡傞偙偲偵傛傝丄屭媞偵嵟揔側幵椉傪弖帪偵専嶕壜擻
僞僋僔乕攝幵偱eREX偑偱偒傞偙偲
僯乕僘
仠丂儅儖僠僗僞乕僩乮僞僋僔乕乯乛僔儞僌儖僑乕儖乮屭媞乯偺宱楬扵嶕偑朷傑傟偰偄傞丅
仠丂媶嬌揑偵偼丄暋悢偺屭媞偐傜偺屇傃弌偟傪堦婥偵夝寛偡傞偙偲偑朷傑偟偄丅
僔乕僘
仠丂eREX偵偼丄暋悢偺婲揰媦傃廔揰偵偮偄偰偺宱楬扵嶕傪崅懍壔偡傞曽朄偑2庬椶懚嵼偡傞
屭媞偵嵟揔側幵椉偺専嶕
仠 Step1丂堦妵宱楬扵嶕傪侾夞偩偗幚峴
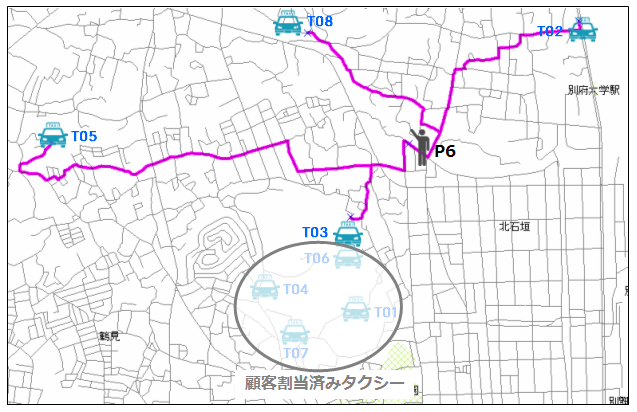
暋悢僞僋僔乕乮婲揰乯偼乽濨枂側巜帵惂屼揰乿丄暋悢屭媞乮廔揰乯偼乽廔揰偺暋悢壔乿偲偟偰幚尰偟傑偡丅
僞僋僔乕偺廳暋妱傝摉偰偑娷傑傟側偄恾侾偺傛偆側僷僞乕儞偱偁傟偽丄堦妵宱楬扵嶕侾夞偱僞僋僔乕悢亊屭媞悢夞偺宱楬専嶕偲摨摍偺寢壥偑摼傜傟丄姰慡偵嵟揔側僞僋僔乕偺妱傝摉偰偑媮傔傜傟傑偡丅
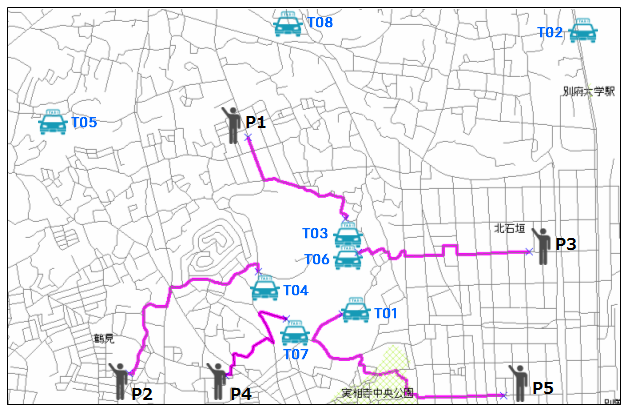
恾侾丂扨弮僷僞乕儞
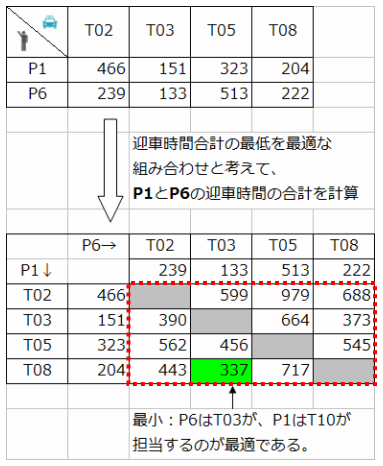
偟偐偟丄偙偺曽朄偺栤戣揰偼丄僞僋僔乕偺廳暋妱傝摉偰偑敪惗偟摼傞揰偱偡丅 乮恾 2嶲徠乯
恾 2偱偼丄恾1偲斾妑偟偰P6偑捛壛偝傟偨偨傔偵丄T03偺廳暋妱傝摉偰偑敪惗偟偰偄傑偡丅
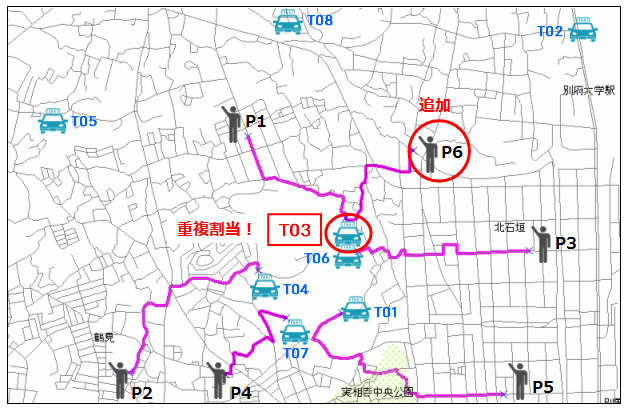
恾俀丂廳暋妱摉偑敪惗
僞僋僔乕偺廳暋妱傝摉偰偑敪惗偟偨応崌偼丄師偺僗僥僢僾偵恑傒傑偡丅
仠 Step2a丂堦妵宱楬扵嶕傪嵟掅侾夞幚峴
恾 2偱偼P1偲P6偱T03傪庢傝崌偭偰偄傑偡丅
偙偺帪丄扨弮偵T03偼P6偺曽偑嬤偄偺偱P6偵妱傝摉偰傞偲丄P1偑偁傇傟傞偙偲偵側傝傑偡丅
偦偙偱崱搙偼丄偁傇傟偨屭媞傪廔揰丄巆偭偨乮枹妱傝摉偰偺乯僞僋僔乕傪婲揰偲偟偰丄Step1傪幚峴偟傑偡丅
偙傟傪偁傇傟偨屭媞偑偄側偔側傞傑偱孞傝曉偟傑偡丅
恾俁偱偼偁傇傟偨屭媞偼P1丄巆偭偨乮枹妱傝摉偰偺乯僞僋僔乕偼T02丄T05丄T08偱偡丅
偙偺帪丄T03偼婛偵P6偵妱傝摉偰嵪傒偲峫偊傑偡丅
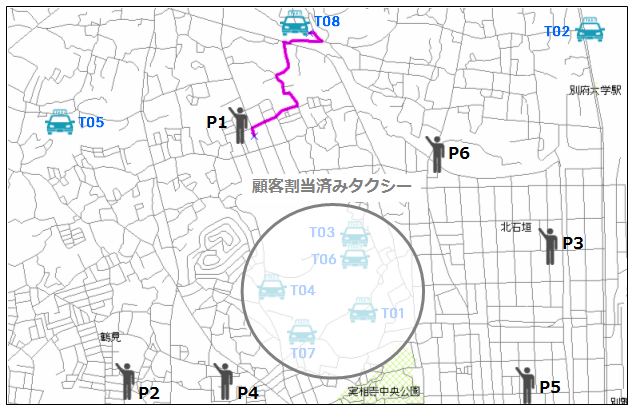
恾俁丂枹寛掕屭媞偺嵞搙扵嶕仺廔椆傊
仠 Step2b丂堦妵宱楬扵嶕傪枹寛掕屭媞悢夞幚峴
扨弮側曽朄偱偁傞Step2a傪戙懼偡傋偔丄懠偺曽朄偲偟偰埲壓偑峫偊傜傟傑偡丅
偙偺曽朄偵傛傟偽丄夝偺嵟揔惈偼傛傝崅傑傞偲巚傢傟傑偡丅
僞僋僔乕偺廳暋妱傝摉偰偑敪惗偟偨屭媞偺P1偲P6傪婲揰丄巆偭偨乮枹妱傝摉偰偺乯僞僋僔乕T02丄T05丄T08丄媦傃T03乮T03傕枹妱傝摉偰偲峫偊傞乯傪廔揰偲偟偰丄堦妵宱楬扵嶕傪屭媞偺悢暘乮偙偺応崌偼俀夞乯幚峴偟傑偡乮恾係媦傃恾俆嶲徠丄乽廔揰偺暋悢壔乿偺棙梡乯丅
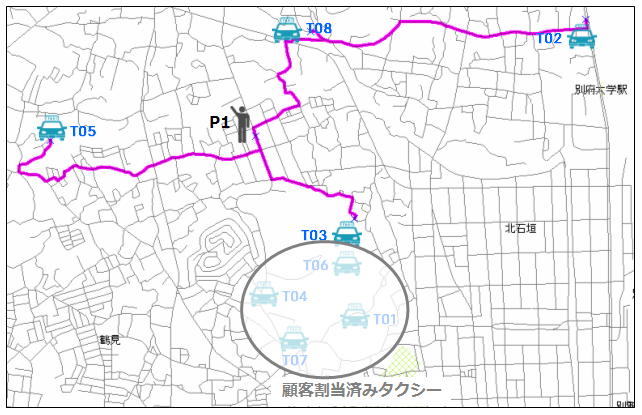
恾係丂枹寛掕屭媞偺嵞搙扵嶕乮P1乯乮嵟揔壔偺弨旛乯
恾俆丂枹寛掕屭媞偺嵞搙扵嶕乮P6乯乮嵟揔壔偺弨旛乯
偡傞偲丄枹寛掕屭媞偲枹妱傝摉偰僞僋僔乕偺妡偗崌傢偣偺僐僗僩乮嫍棧乛帪娫乯儅僩儕僋僗偑媮傔傜傟傑偡丅
偙偺僐僗僩儅僩儕僋僗偵婎偯偄偰丄嵟揔側慻傒崌傢偣傪媮傔傞偙偲偑弌棃傑偡乮恾俇媦傃恾俈嶲徠乯丅
恾俇丂枹寛掕屭媞偺嵞搙扵嶕 仺 廔椆傊
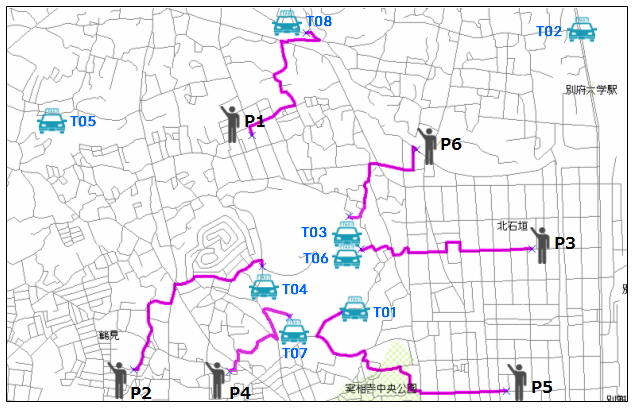
恾俈丂廳暋妱摉帪偺嵟揔壔偵傛傞攝幵寢壥
忋婰偺寁嶼偱偼丄乽廔揰偺暋悢壔乿偑棙梡偝傟偰偄傞偨傔丄寢壥揑偵暋悢僞僋僔乕乮婲揰乯偐傜堦恖偺屭媞乮廔揰乯偱偼側偔丄堦恖偺屭媞乮婲揰乯偐傜暋悢僞僋僔乕乮廔揰乯傊偺宱楬扵嶕丄偮傑傝媡岦偒偺宱楬扵嶕偑峴傢傟偰偍傝傑偡丅
傛偭偰丄媮傔傜傟偨嵟揔宱楬乮偺帪娫乛嫍棧乯偺惛搙偵媈栤偑惗偠傑偡偑丄埲壓偺棟桼傛傝惛搙偼梋傝栤戣偵偼側傜側偄偲峫偊偰偍傝傑偡丅
| 尷掕揑側棙梡 | 嵟揔宱楬扵嶕寢壥偺帪娫乛嫍棧偼丄偁偔傑偱乽廳暋妱傝摉偰乿偲尵偆尷掕揑側働乕僗偵偍偄偰偺傒棙梡偝傟傞偵夁偓側偄丅 傑偨丄偦偺抣偼扨撈偱棙梡偝傟傞偙偲偼側偔丄崌寁傪媮傔偰嵟彫抣傪慖戰偡傞偲偄偆乽慻傒崌傢偣嵟揔乿偺拞偱棙梡偝傟偰偄傞丅 廬偭偰丄屄乆偺悢抣偺塭嬁偼憡懳揑偵偼掅偔丄奣嶼抣偱傕峔傢側偄偲峫偊傜傟傞丅 偙偙偱偺乽慻傒崌傢偣嵟揔乿偼擩傠丄崅懍張棟偺曽偑廳梫栚昗偱偁傞偲偆峫偊傕偁傞丅 |
|---|---|
| 摴楬僱僢僩儚乕僋傊偺 媡曽岦愝掕 |
廰懾傗懍搙婯惂丄堦曽捠峴側偳偺曽岦埶懚忣曬偵偮偄偰丄偦偺岦偒偑恀媡偲側傞傛偆側摴楬僱僢僩儚乕僋僨乕僞傪嶌惉偟偰偍偔偙偲偱丄媡曽岦偺扵嶕偱傕惓偟偄寢壥偵嬤晅偔偲峫偊傜傟傞丅 |
偍栤偄崌傢偣
嵟揔儖乕僩扵嶕僄儞僕儞eREX傊偺偍栤偄崌傢偣偼丄儊乕儖傑偨偼揹榖偱偛楢棈捀偗傟偽岾偄偱偡丅
E-Mail:support@ncm-git.co.jp
TEL:03-6902-9701